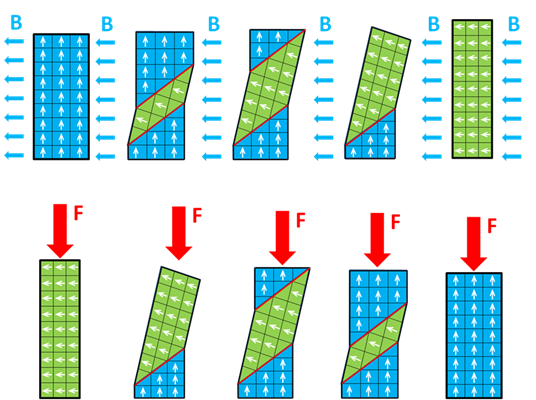
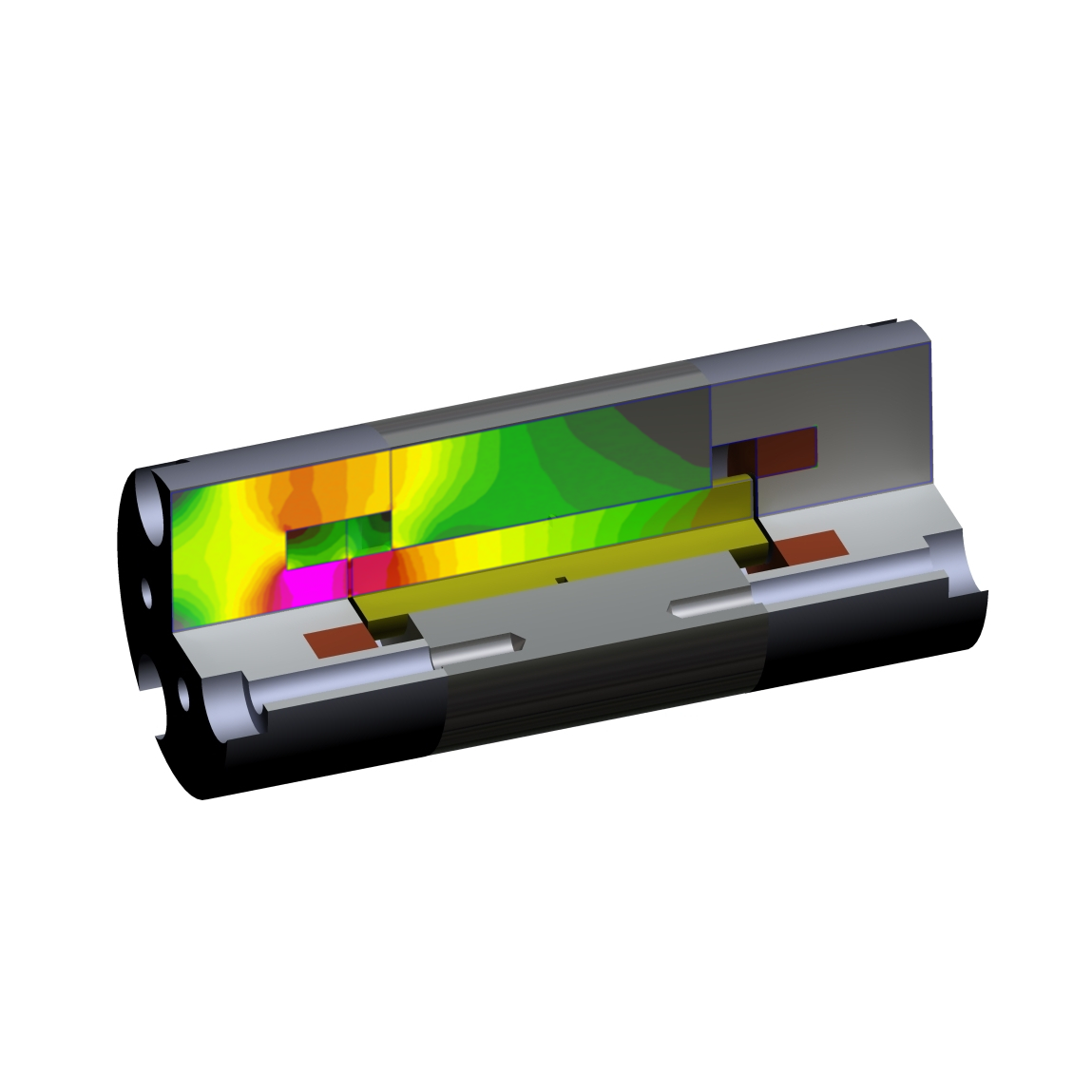
Magnet actuators
Due to the ongoing progress in microelectronics, components are getting smaller and often more sensitive. This results in demands on the gripper for the assembly of these components. In cooperation with the ETO group, gripper prototypes are to be investigated which generate the required linear motion by using magnetic shape memory alloy. Topics such as position control, force control, self-sensing and modeling will be investigated. more...

Model predictive temperature control
In modern, industrial furniture production, wood panels made of pressboard are very often used. The narrow-surface sealing of the boards is an elementary component here and makes high demands on the process engineering. Together with HOMAG GmbH, the ISD is working on modern, model-predictive control algorithms for this process. more...

Intelligent driver assistance
Self-balancing passenger transporters open up completely new possibilities and horizons for people with a walking disability and for all those who desire a high degree of mobility with maximum comfort. In the project Driver Assistance Systems, a research group of the ISD is developing intelligent algorithms together with JOYY Mobility GmbH, which are able to detect potentially dangerous situations in advance and to initiate suitable measures for accident avoidance by permanent detection of the environment and model-predictive control. more...

Development of a sensor setup for the realization of autonomous applications on inland waters
With the help of an optical sensor setup consisting of laser sensor, cameras, GPS and inertial sensor technology, the environment of the boat and its own movement will be recorded. From this data, the environment is to be described as precisely as possible in order to realize applications such as autonomous docking or collision avoidance. more...

Development and testing of an integrated autonomous measurement system for maritime surveying tasks
The aim of the project is the integration of a collision avoidance to improve the autonomy and the handling of the Sonobot. In addition, a mathematical model of the dynamic properties of the Sonobot is created and its parameters are identified. This model will then be used for simulations to investigate and improve control algorithms and their parameters. more...

New procedures for avoiding ship collisions on inland waters
In the "Collosion Avoidance" project of the HTWG Konstanz, collision avoidance strategies for sports boats on inland waters are to be investigated and developed. For this purpose, the local traffic situation must be detected and processed by appropriate algorithms in accordance with cost-effective and energy-efficient sensor system. On the basis of these data, the ship owner shall be given warnings about a ship's collision and an evasive maneuver proposed. In the final step, the boat should be able to move independently to a custom location. more ...
Softlanding for Fast-Switching Electromagnetic Actuators
Fast-switching electromagnetic actuators are applied in many technical systems. For instance, they are used in antilock braking systems (ABS), camless engines, or in digital hydraulics. The predominant control strategy of these actuators is the so-called Boost-and-Hold method. However, this method comes along with high dissipation of energy, and as a result it is normally not energy-optimal. In the "Softlanding" project of the Constance University of Applied Sciences, procedures to the control, observation, and diagnostics for fast-switching electromagnetic actuators shall be developed. This includes strategies, that are energy-optimal on the one hand, and enable softlanding on the other hand. mehr ...

Catamaran Robot: Locomotion In Maritime Environments
The aim of the CaRoLIME project is to develop a water robot that can navigate and work independently in an unknown environment. A test carrier is developed on which the use of various sensors, drive and control concepts can be investigated. more...
Diagnostics and Prognostics for Linear Electromagnetic Actuators
With increasing machine and component complexity, advanced maintenance strategies become more desirable and necessary. Besides the widely used break-down maintenance (fix it when it breaks) two approaches exist, that try to plan and schedule maintenance. One is preventive maintenance, where components are replaced or maintained based e.g. on a constant time interval, the other one is predictive maintenance. Here the aim is to estimate the current state of health of a component and to predict its remaining useful life based on diagnostic and prognostic methods. mehr...
State Estimation for Electromagnetic Actuators
In order to realize advanced control or enable enhanced diagnostic opportunities, knowledge of the system state is a key requirement. The use of additional sensors is, in general, prohibited due to cost or space restrictions, or at least undesired due to reliability reasons. mehr ...