New procedures for avoiding ship collisions on inland waters
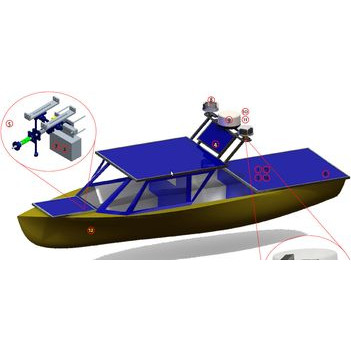
In the "Collosion Avoidance" project of the HTWG Konstanz, collision avoidance strategies for sports boats on inland waters are to be investigated and developed. For this purpose, the local traffic situation must be detected and processed by appropriate algorithms in accordance with cost-effective and energy-efficient sensor system. On the basis of these data, the ship owner shall be given warnings about a ship's collision and an evasive maneuver proposed. In the final step, the boat should be able to move independently to a custom location.
In the shipping sector collisions account for the majority of all accidents. Statistics show human errors as a major cause of accidents. In order to reduce the risk of collision, commercial navigation systems based on GPS, radar, automatic identification system (AIS) and digital maps (ECDIS) are used to assist the skipper with the navigation.
For non-commercial transport and smaller sport boats, appropriate systems are not common. These boats, however, account for the largest share of traffic on inland waters. The transferability of existing systems is not possible for a variety of reasons.
The project is carried out at the faculty of Electrical Engineering in the field of control engineering under the direction of Prof. Dr. Johannes Reuter. The entire research project is funded by the Federal Ministry of Education and Research (BMBF) and the German Federation of Industrial Research Associations "Otto von Guericke" (AiF). In addition to HTWG Konstanz, the Institute for System Dynamics (isys) of the University of Stuttgart, the Max Planck Society for Dynamics of Complex Technical Systems and the Ulm University of Applied Sciences, as well as the companies Innovative Navigation GmbH and NAVICO are involved in this project.
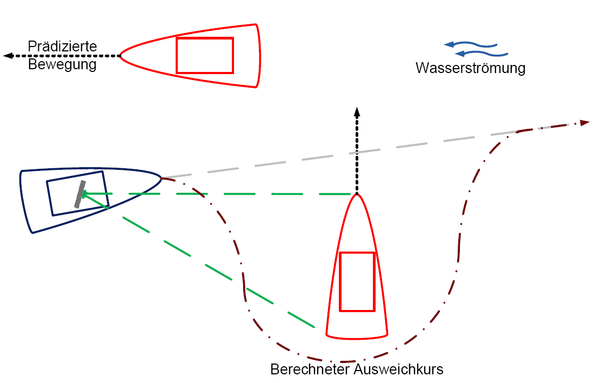
Typical scenario
The autonomous boat (blue) determines the current position and the assumed direction of movement, as well as data on environmental influences (wind, current, etc.) for each object located in the sensor range (red). In the following figure, the autonomous boat will recognize a boat, having the right of way, crossing its course. An avoidance route is then calculated and, if necessary, executed automatically. After completion of the maneuver, the boat returns to the original course.

Stefan
Wirtensohn
Room
E
207
+49 7531 206-549
stwirten@htwg-konstanz.de
Office hours
Nach Vereinbarung

Michael
Blaich
mblaich@htwg-konstanz.de

Michael
Schuster
Room
E
207
+49 7531 206-576
michael.schuster@htwg-konstanz.de
Research focus
The project is divided into two areas:
- The first topic is data fusion and object tracking. The sensor data shall be processed and fused, taking into account the movement of the vessel. From this data a map with all moving and static objects of the environment is created.
- The second area deals with the path planning and the automated carrying out of maneuvers. From the dynamic map a collision-free path to the target must be calculated. From the determined path, the control variables for the rudder and the drive are derived via adaptive course controllers.
Applications
- Support the skipper to reduce collisions
- Optimization of fuel consumption
- Performing Routine Activities (e.g., sampling)
- Patrols
- Self-positioning buoy
- Automated docking
Publications
- Mission Integrated Collision Avoidance for USVs using Laser Ranger, M. Blaich, S. Köhler, M. Schuster, J. Reuter, Thomas Tietz, 2015
- Trajectory Generation for Vessels using a Reachability Graph, M. Blaich, S. Wirtensohn, J. Reuter, Axel Hahn, 2015
- Probabilistic Data Association for Tracking Extended Targets Under Clutter Using Random Matrices, M. Schuster, J. Reuter, Gerd Wanielik, 2015
- Collision Avoidance for Vessels using a Low-Cost Radar Sensor, M. Schuster, M. Blaich, J. Reuter, 2014
- Objektverfolgung bei einer vollständigen Fahrzeugumfeldüberwachung mittels Radar , M. Schuster, Pech, Thomas, J. Reuter, Wanielik, Gerd, 2014
- Optimal Control Allocation for an ASC with two Azimuth-like Thrusters with limited Panning Range, M. Oswald, M. Blaich, S. Wirtensohn, J. Reuter, 2014
- Motion Estimation of an Autonomous Surface Craft using an Unscented Kalman Filter, S. Wirtensohn, M. Schuster, M. Oswald, J. Reuter, 2014
- Neue Verfahren zur Kollisionsvermeidung auf Wasserstraßen durch Optimierung der Schiffsrouten, M. Blaich, M. Schuster, J. Reuter, 2014
- Positionsbestimmung und Bewegungsschätzung für Wasserfahrzeuge mittels Unscented Kalman Filter, S. Wirtensohn, M. Schuster, J. Reuter, 2014
- Tracking of Vehicles on Near Side Lanes using multiple Radar Sensors, M. Schuster, J. Reuter, G. Wanielik, 2014
- Modelling and Identification of a Twin Hull Based Autonomous Surface Craft, S. Wirtensohn, J. Reuter, M. Blaich, M. Schuster, O. Hamburger, 2013
- Design of a Twin Hull Based USV with Enhanced Maneuverability, M. Blaich, S. Wirtensohn, M. Oswald, O. Hamburger, J. Reuter, 2013
- Mapping Of Inland Waters Using Radar, Matthias Greuter, M. Blaich, M. Schuster, Matthias Franz, J. Reuter, 2012
- Fast Grid Based Collision Avoidance for Vessels using A* Search Algorithm, M. Blaich, Michael Rosenfelder, M. Schuster, Oliver Bittel, J. Reuter, 2012
- Extended Grid Based Collision Avoidance Considering COLREGs for Vessels, M. Blaich, Michael Rosenfelder, M. Schuster, Oliver Bittel, J. Reuter, 2012
- Integration von Navigationsalgorithmen in Regelkreise am Beispiel autonomer Systeme auf dem Wasser, J. Reuter, M. Blaich, M. Schuster, 2012