Studenten entwickeln einen robusten Greifer mit Elektromagnet-Aktor
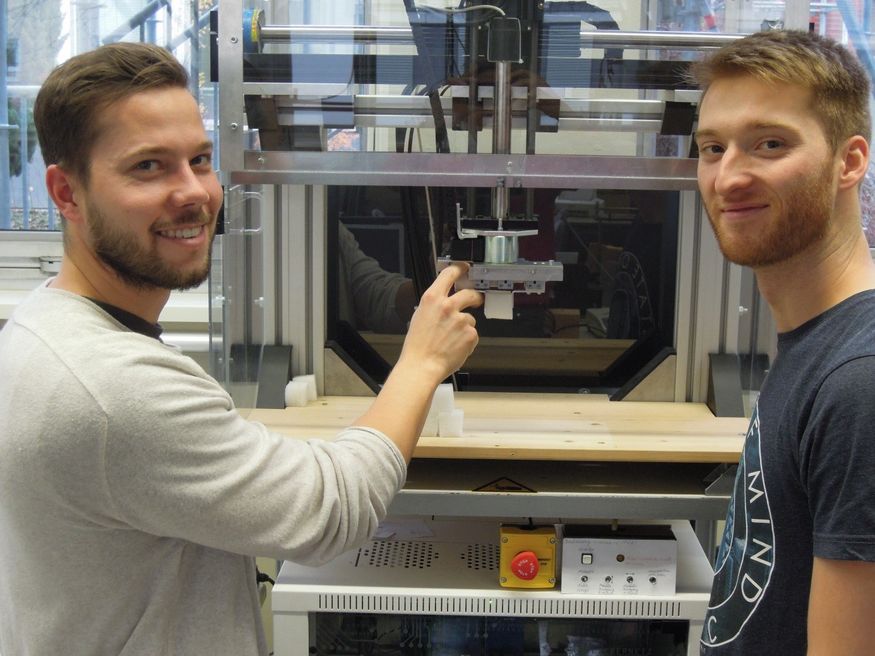
Fabian Streicher (li) und Julian Winkelmann zeigen Ihren Greifer, der gerade einen weißen Würfel hält.
In ihrer Projektarbeit im Studiengang MKE entwickelten die Studenten Julian Winkelmann und Fabian Streicher einen kompakten, robusten Greifer, der die bisher verwendeten Pneumatik-Greifer ersetzen kann.
In der Verpackungs-, Fertigungs- und Montage-Automatisierung werden vielfach Roboter-Arme mit Greifern als „Hand“ eingesetzt. Trotz des generellen Umstiegs von pneumatischen auf elektrische Antriebe, existieren in der industriellen Praxis Anlagen, die hochmoderne Roboterachsen (z.B. mit Linearmotoren) mit „altbackenen“ Pneumatik-Greifern kombinieren.
In der Projektarbeit 1 des Studiengangs MKE war deshalb die Aufgabe für Herrn Julian Winkelmann und Herrn Fabian Streicher die Entwicklung eines kompakten, robusten Greifers, der die bisher verwendeten Pneumatik-Greifer ersetzen kann. Daher wurde schon in der Anforderungsliste auf das kraftschlüssige Halten des Werkstücks, auf schnelles Öffnen und Schließen und auf die einfache, binäre Ansteuerung mit 24V Gleichspannung geachtet. In einer intensiven Ideenfindungsphase erarbeiteten die Studierenden mehrere Konzepte mit rotatorischen und translatorischen Magnet-Aktoren, mit alternativen Ansätzen, um die Synchronität der Greiferbacken sicherzustellen, auch bei starken Beschleunigungen des gesamten Greifers. Schließlich wählten sie in ihrem „morphologischen Kasten“ das Konzept mit Drehmagnet, Ritzel, zwei Zahnstangen, Führungen und Federn. Bei der Ausarbeitung der Konstruktion achteten sie auf geringe Masse, kostengünstige Fertigung und einfache Montage. Ein großer Dank gilt der Metall-Werkstatt der Hochschule und ihrem Leiter Herrn Jürgen Romer für die Begleitung des Entwurfs und die Fertigung der Einzelteile.

Die Detail-Aufnahme von unten zeigt Ritzel, Zahnstangen, Führungen und Federn.
Im Oktober 2018 montierten Herr Streicher und Herr Winkelmann ihren neuen Greifer an den Zweiachs-Linearmotor-Roboter im Labor für mechatronische Systeme. Anschließend konnten mehrere Labor-Übungs-Gruppen aus MEP5 und MKE5 ihre Programmier-Übungen an diesem Aufbau durchführen. Der neue „Schnapp-Greifer“ hat dabei viel Freude gemacht.
Insgesamt ist in der Projektarbeit ein Prototyp eines neuartigen Greifers entstanden, der sogleich in der Lehre eingesetzt wird und der in eine Marktlücke vorstoßen könnte.
(Text und Fotos vom Betreuer Prof. Dr. Roland Nägele.)