Labor für Mobilität
Zentrum der Lehre und angewandten Forschung
Im Mittelpunkt des Labors stehen neue Antriebstechnologien und Fahrzeug-Konzepte, um Lösungsalternativen einer nachhaltigen, effizienten und vernetzten Mobilität von morgen zu erproben. Auf einer Prüffläche von insgesamt ca. 300 m2 mit fünf Prüfständen und einem Fuhrpark von sieben zwei- und vierrädrigen Testfahrzeugen vermitteln wir zukünftigen Ingenieur*innen im Rahmen ihrer Hochschulausbildung praktische Kompetenzen und Fertigkeiten.
Ob autonome Fahrzeuge, Elektromobilität, Fahrwerksysteme und Fahrdynamik oder Gesamtfahrzeug-Simulationen – wir begleiten Sie auf dem Weg bei der Entwicklung innovativer Mobilitätslösungen.
Autonomes Fahren

Mit unserem „MXCarKit“ steht uns eine freiprogrammierbare Konzeptplattform zum Autonomen Fahren zur Verfügung. Technologisch steht das Modellfahrzeug im Maßstab 1:8 einem realen Fahrzeug in nichts nach. Ausgestattet mit Stereo-Kamera, 2D 360° LIDAR sowie Ultraschallsensoren werden Umfeld-Daten erfasst und Objekte sicher erkannt. Die Daten laufen auf einem performanten Nvidea Jetson board zusammen, wo sie zur weiteren Bahnplanung fusioniert und interpretiert werden, um das Fahrzeug dann sicher zu navigieren und situationsgerecht mit Längs- und Querregler zu führen.
Prüfeinrichtungen
Für Lehr- und Forschungszwecke stehen uns unterschiedliche Prüfeinrichtungen für Fahrzeuge zur Verfügung.

PKW Gesamtfahrzeug-Rollenprüfstand
für Leistungs- und Energiebedarfstest // Gesamtfahrzeug-Rollenprüfstand für PKWs // Leistungs- und Energiebedarfsmessungen // Peak-Leistung 600 kW

Zweirad Rollenprüfstand
für Leistungs- und Energiebedarfstests // Rollenprüfstand speziell für Zweiräder // geringere Schwungmasse der Rolle erleichtert die Tests

Motorenprüfstände zur Kennfeld- und Emissionsmessung
Messung von Temperatur und Druck an verschiedenen Stellen des Motors zur thermodynamischen Beurteilung // Druck-Indizierungsmessung im Brennraum ermöglicht die Darstellung von p-V-Diagrammen während des Betriebs // Emissionsmessung von NOx, CO, HC, lamda // Freiparametrierbare Steuergeräte gewährleisten die Vorgabe relevanter Applikationsparameter wie Zündwinkel, lamda etc.
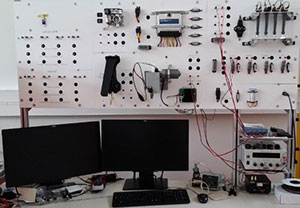
Hardware-in-the-loop (HIL) Prüfstand
Testen von Steuergeräten und spezifischen Datenständen // Variation von Fahrzyklen // Validierung Prüfstand und Simulation // Real time target (speed goat) // Verschiedene Motormodelle (simulink)
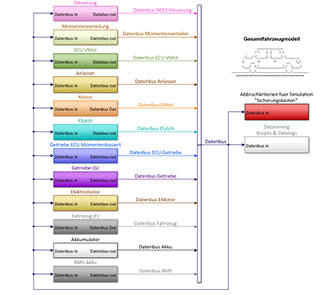
Simulation und virtueller Fahrversuch
Ein weiterer Schwerpunkt liegt auf der Simulation und dem virtuellen Testing, das es uns ermöglicht, neue Fahrzeugkonzepte, Antriebstechnologien und Fahrwerksysteme in einer sicheren und realitätsnahen Umgebung kundennah zu evaluieren.
Durch fortschrittliche Simulationssoftware können wir die Längs-, Quer- sowie Vertikaldynamik des Fahrzeugs detailgetreu abbilden. Dies ermöglicht es uns, effiziente und zuverlässige Lösungen zu entwickeln, die die Sicherheit und Leistungsfähigkeit unserer Fahrzeuge gewährleisten.
Unsere angehenden Ingenieur*innen werden an und mit Industrie-Standard-tools praxisnah und projektbasiert ausgebildet.
Fahrdynamik-Simulation

Antriebssysteme
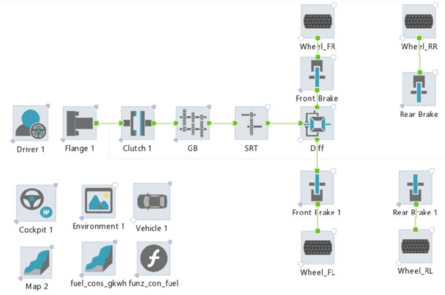
Energieverbrauch und standardisierte Zyklen
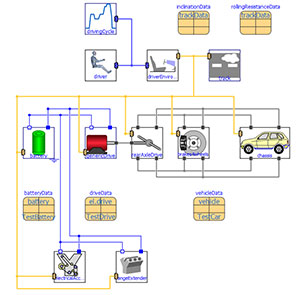
Gesamtfahrzeug
Kontakt

Prof. Dr. Ing. Alexander Basler
Studiendekan & Prüfungsamt ASE, MME, Fachgebiete: Fahrzeug-Mechatronik, Antriebstechnik und Elektromobilität, Simulation, Funktions- und Softwareentwicklung
Raum A 134
+49 7531 206-307
alexander.basler@htwg-konstanz.deSprechzeiten
nach Vereinbarung per Mail
Christian Meyer
+49 7531 206-306
christian.meyer@htwg-konstanz.de
Andreas Volk
Raum A 134
+49 7531 206-306
avolk@htwg-konstanz.de