Für die Erforschung der Mobilität von morgen
23.09.2022


Klein, aber sehr fein: Die HTWG verfügt über ein Modellauto, das einem realen Fahrzeug hinsichtlich Sensorik und Software in fast nichts nachsteht. Es bietet Studierenden eine große Bandbreite an Anwendungsfeldern: Vom Fahrzeugmodell für das Fahrwerk über Sensorik und moderner Datenverarbeitung bis zum Testen autonomer Fahrfunktionen.
Beim Blick auf die Neuanschaffung der HTWG bekommen nicht nur Fans von Modellautos leuchtende Augen: Das windschnittige, 70 Zentimeter lange und 30 Zentimeter breite Fahrzeug verfügt über die technische Ausstattung, die ein autonom fahrendes Elektroauto ausmacht: Umfangreiche Sensorik, Akkus und einen leistungsstarken Rechner.
Studierende verschiedener Fakultäten der HTWG werden an dem Modell Projekt- und Abschlussarbeiten erarbeiten können. Sie können mit dem Modellauto an der VDI Autonomous Driving Challenge teilnehmen. In diesem Wettbewerb lösen sie unterschiedliche Aufgabenstellungen des autonomen Fahrens auf einem vordefinierten Parcours. Auch das Bodensee Racing Team erhält mit dem Modellauto eine Testplattform für die Weiterentwicklung des Rennfahrzeugs Iltis, das bei den neuen Disziplinen der Formular Student auch selbstständig fahren wird.
"Christkind und Osterhase gleichzeitig"
Prof. Dr. Alexander Basler ist die Begeisterung für das neue Inventar in seinem Labor für Fahrzeugmechatronik anzusehen. „Diese Woche kamen das Christkind und der Osterhase gleichzeitig zu uns an die HTWG“, freute er sich. Was sie im Gepäck hatten, ist ein MXCarKit aus dem Hause MdynamiX. Die Silhouette ist einem Sportwagen nachempfunden. Das Innenleben ist eine „Konzeptplattform zum automatisierten Fahren im Modellmaßstab 1:8, welche einem realen Fahrzeug technologisch hinsichtlich Sensorik und Software in nichts nachsteht“, erläutert Prof. Basler. Das heißt: Es verfügt über eine Stereokamera, über einen Lidarsensor und zahlreiche Ultraschallsensoren. Damit kann das Fahrzeug eine 360-Grad-Erfassung seiner Umwelt gewährleisten. Die dabei entstehenden großen Datenmengen überfordern das Modellauto nicht: „Es ist ein Computer auf Rädern“, erläutert Prof. Basler.
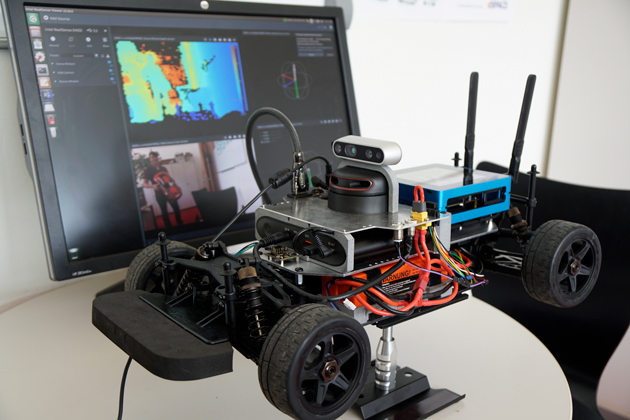
Die starke Rechenkapazität erlaubt das Testen von eigener komplexer Software selbst mit aufwändigen Algorithmen. „Autonom fahrende Fahrzeuge müssen sich ein Bild ihrer Umwelt machen. Sie müssen Verkehrsschilder, Zebrastreifen und Fußgänger erkennen. Das ist alles sehr rechenaufwändig, aber auch mit dem Rechner dieses Modellautos sowie intelligenter Algorithmik machbar“, ergänzt Prof. Dr. Thomas Hellmuth. Und so wird die mitgelieferte Fernsteuerung künftig immer weniger zum Einsatz kommen.
Wertvoller Nachweis für künftige Arbeitgeber
Der Aufwand zur Inbetriebnahme sei recht gering, da eine speziell angepasste und komplett zugängliche Basissoftware zur Verfügung gestellt wird. Die Möglichkeiten für die Nutzung in der Erforschung der Mobilität von morgen ist allerdings sehr vielfältig. Von Fahrerassistenzsystemen über autonomes Fahren und Robotik bis zur Cybersecurity biete das MXCarKit eine enorme Bandbreite an Anwendungsfeldern. Prof. Basler steht deshalb in Kontakt nicht nur mit Lehrenden der Fakultät Maschinenbau, sondern auch Elektrotechnik und Informationstechnik sowie Informatik.
Das Fahrzeug verbindet die Faszination von Forschung und Lehre mit spielerischer Begeisterung. Es bietet den idealen Entwicklungsschritt zwischen Simulation und der Implementierung im realen System. Schließlich kann mit einem solchen Modellfahrzeug experimentiert werden, ohne Sicherheitsrisiken im realen Fahrversuch mit Maßstab 1:1 eingehen zu müssen. Und auch an der „Hardware“ wie zum Beispiel dem Fahrgestell gibt es Spielraum für Erweiterungen und erlaubt damit ein prototypisches Implementieren neuer Ansätze.
Gleichzeitig werden etablierte und quelloffene Softwaremodule eingesetzt, die in verschiedensten Bereichen der Industrie verwendet werden. Als Beispiel kann das aus der Robotikentwicklung und dem automatisiertem Fahren bekannte Robot Operation System (ROS) genannt werden. Es ermöglicht durch standardisierte Schnittstellen eine einfache Handhabung und Entwicklung von Anwendungssoftware, sowie die Integration weiterer Sensoren und Aktoren.
Das Modellauto ist zudem mit einem WLAN Modul ausgestattet, das live Telemetrie und online Datenauswertung erlaubt. Das heißt, schon während der Fahrt können alle Sensordaten analysiert werden und das Fahrzeug parametriert werden. Auch Aufzeichnungen der gefahrenen Manöver für eine spätere Analyse sind möglich.
Studierende arbeiten somit an zahlreichen realen Problemstellungen und Lösungen. Künftigen Arbeitgebern können sie damit fundierte Einblicke und praktische Anwendungserfahrung nachweisen.
Plan: Teilnahme am VDI Autonomous Driving Challenge Cup
Prof. Basler und Prof. Hellmuth sehen sehr viele Anwendungsmöglichkeiten des MXCarKits, welche unter anderem die erfolgreiche Teilnahme bei der VDI Autonomous Driving Challengeermöglicht. Ihr gemeinsames Ziel ist es, schon bald mit einem studentischen Team daran teilzunehmen.
Die Aufgabenstellung des Wettbewerbs ist anspruchsvoll, denn innerhalb weniger Monate sollen die teilnehmenden Teams ein funkferngesteuertes Modellauto so modifizieren, dass ein zuvor unbekannter Rundkurs autonom auf Zeit durchfahren werden kann, verschiedene Parkaufgaben gelöst werden und alle Disziplinen durch „Connected Drive“ (WLAN-Signale) starten und stoppen.