Robotik im Bauwesen
Experimentelles Labor für digitale Fertigung
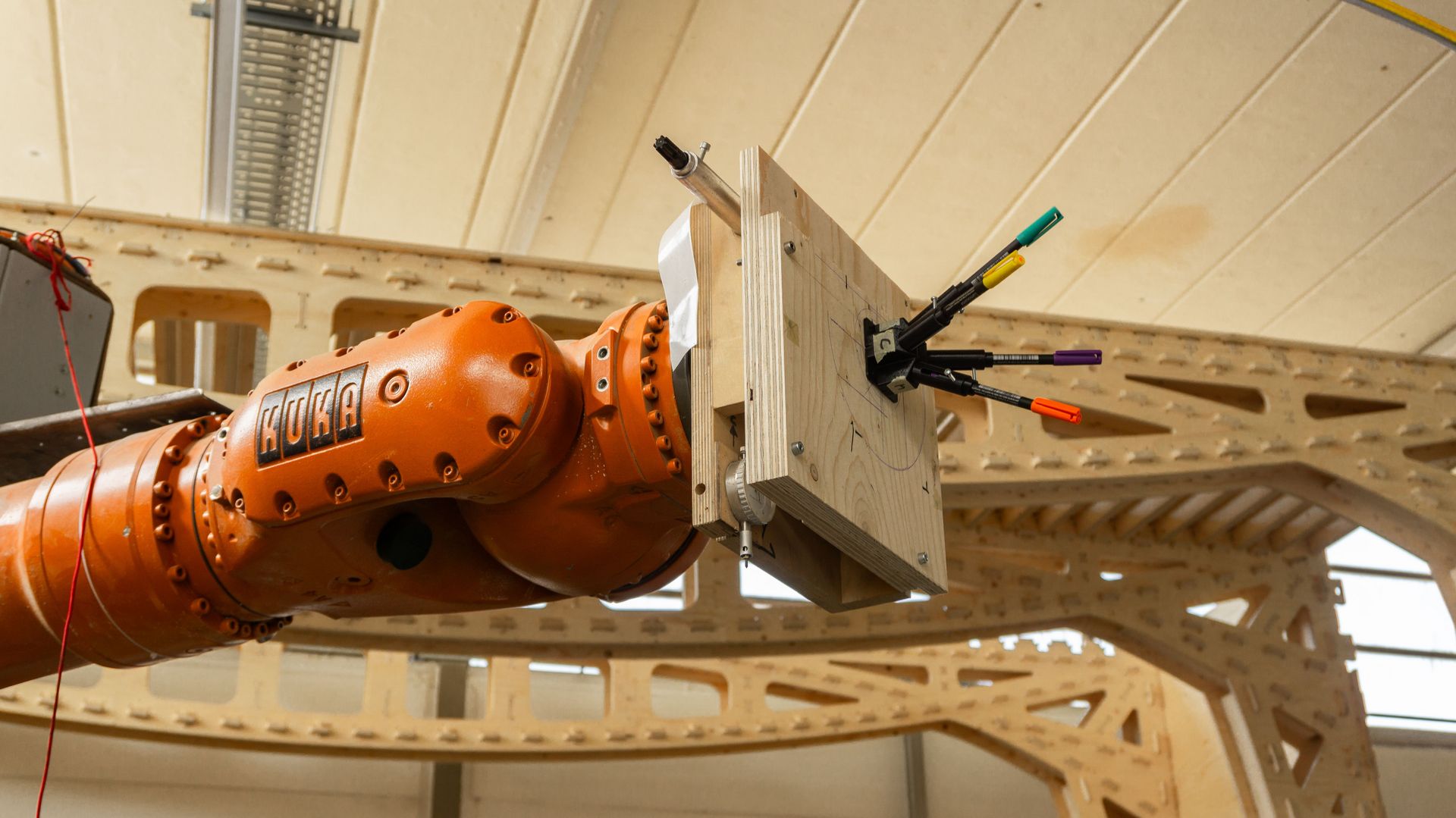
Die Hochschule verfügt seit diesem Semester über einen professionellen Industrieroboter, der mit speziell entwickelten Werkzeugen und optimierten Prozessen bis zu 300 kg bewegen, greifen, stecken, hämmern und millimetergenau positionieren kann – auf einer Arbeitsfläche von 10 x 3 Metern. In diesem Kurs steht die direkte Wechselwirkung zwischen der „Erfindung“ von Werkzeugen, der „Gestaltung“ von Prozessen und den Fähigkeiten des Roboters im Mittelpunkt.
Zunächst werden die Studierenden durch kleine Übungen mit der Steuerung, den Sicherheitsaspekten und den grundlegenden Anwendungen des Roboters vertraut gemacht. Danach folgt der spannende Teil: Sie entwickeln eigene kreative Werkzeuge und Prozesse, um neue Bauweisen mit Robotern zu erforschen. Der experimentelle Kurs findet im Innolab Bodensee im Bückleareal statt und ist Teil des Forschungsprojekts Walz 4.0, das die interdisziplinäre Zusammenarbeit zwischen Architekten, Bauingenieuren und dem Handwerk stärkt. Begleitet wird die Lehrveranstaltung von Designer Tom Pawlofsky, einem Experten für robotergestützte Fertigungsprozesse.
Ziel des Kurses ist es, den Studierenden einen offenen und kreativen Zugang zur Automatisierungstechnik zu ermöglichen. Dabei geht es nicht nur um technisches Wissen, sondern vor allem um das experimentelle Entwickeln innovativer Bauprozesse, die Handwerk und digitale Technologien miteinander verbinden.


Zielsetzung
Die Lehrveranstaltung Robotik im Bauwesen richtet sich an Masterstudierende der Architektur und des Bauingenieurwesens. Sie verbindet experimentelle Robotik mit digitalen Fertigungsprozessen und handwerklichen Techniken. Der Fokus liegt auf der Entwicklung kreativer und innovativer Bauprozesse durch die Nutzung von Industrierobotern und speziell entwickelten Werkzeugen.
Ziele im Detail:
• Einführung in die Steuerung und Sicherheit von Industrierobotern
• Entwicklung neuer Werkzeuge und Prozesse für robotergestützte Bauweisen
• Interdisziplinäre Zusammenarbeit mit Architektur, Bauingenieurwesen und Handwerk
• Experimentelle Erprobung und Reflexion der entwickelten Prozesse
• Transfer der Erkenntnisse auf reale Bauprojekte
Lehrmethoden und Vorgehensweise
Die Veranstaltung folgt einem experimentellen, praxisnahen und interdisziplinären Ansatz:
• Hands-on-Ansatz: Praktische Einführung in die Robotik mit Übungen und Tests
• Kollaborative Entwicklung: Zusammenarbeit mit Handwerk und Industrie zur praxisnahen Umsetzung
• Iteratives Lernen: Kontinuierliche Weiterentwicklung von Experimenten
• Prototyping und Testen: Eigenständige Entwicklung und Erprobung neuer Bauprozesse
• Expertenimpulse: Vorträge und Diskussionen mit externen Fachleuten

Werkzeuge und Ressourcen
- Robotik-Systeme: Industrieroboter (KR240 L180-2) auf Linearschiene mit verschiedenen Endeffektoren und kollaborativer Roboter mit 5kg Traglast und 700mm Reichweite
- Software: Rhino3d + Grasshopper, RoboDK
- Projektmanagement: Agile Methoden zur iterativen Entwicklung
- Handwerkliche Expertise: Zusammenarbeit mit Handwerk und Industrie
Dieser Kurs wird durchgeführt von
Prof. Dr.-Ing. Michael Bühler, Professur für Bauwirtschaft
Prof. Oliver Fritz, Professur für Digitale Medien und Architekturdarstellung
Prof. Dr.-Ing. Alexander Michalski, Professur für Baustatik