Softlanding for Fast-Switching Electromagnetic Actuators
Fast-switching electromagnetic actuators are applied in many technical systems. For instance, they are used in antilock braking systems (ABS), camless engines, or in digital hydraulics. The predominant control strategy of these actuators is the so-called Boost-and-Hold method. However, this method comes along with high dissipation of energy, and as a result it is normally not energy-optimal. In the "Softlanding" project of the Constance University of Applied Sciences, procedures to the control, observation, and diagnostics for fast-switching electromagnetic actuators shall be developed. This includes strategies, that are energy-optimal on the one hand, and enable softlanding on the other hand.
Softlanding refers to (at best) zero impact velocities of the spool, when it reaches the end-position. This mode of operation leads not only to diminished noise emission but also to lesser wear of material.
A significant aspect of the project is the understanding of control-oriented modeling of eddy current and diffusion effects. This shall be realized by the help of FE-models, however, a particular focus is put on reluctance networks (so-called Flux-Channel-Models) and distributed parameter approaches. The different models allow for deeper insight of the physical relationships, and especially to serve as a basis for modern and model-based control.
To realize such powerful control concepts, the knowledge of the states of the dynamical system - in particular position and velocity - is necessary. If any, the measurement of position is solely possible in a laboratory environment, and costly sensors must be used. Therefore, state estimation techniques are focused by the "Magnetic control systems" group.
The research project is government-funded by the German Federal Ministry of Education and Research, as part of the program IngNachwuch08. Promoter is the Federation of Industrial Research Associations „Otto von Guericke“ (AiF). In this project, the Constance University of Applied Sciences cooperates with a medium-sized business, the TU Ilmenau, the Johannes Kepler University Linz (JKU) and the Linz Center of Mechatronics (LCM).
Scenario
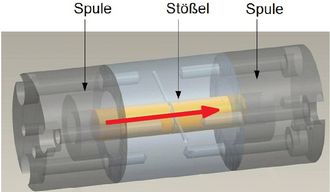
The figure depicts a dual coil solenoid valve of the ISD magnetic controls team. To induce a movement in the illustrated direction, at first the coil on the right side must be energized which accelerates the spool. By energizing the other coil, deceleration of the spool is accomplished, whereby softlanding can be realized.
Research foci
The project is subdivided in the following key subjects:
- Control: Instead of common methods, advanced and nonlinear tracking control shall be applied.
- State estimation/observation: All states of the system shall be ascertained by sole use of current and voltage measurement. Thereby, also system monitoring shall be enabled.
Potential applications
- Optimized fuel efficiency and exhaust gas reduction for camless engines
- Vibration damping and combustion stabilization for fuel injectors at diesel engines and aviation turbines
- Switching vales for digital hydraulics
Publikationen
- Sensorless Position Estimation of Magnetic Actuators, J. Reuter, T. Braun, F. Straußberger, 2015
- A Semilinear Distributed Parameter Approach for Solenoid Valve Control Including Saturation Effects, T. Braun, F. Straußberger, J. Reuter, G. Preissler, 2015
- Position Estimation in Electro-Magnetic Actuators Using a Modified Discrete Time Class A/B Model Reference Approach, F. Straußberger, M. Schwab, T. Braun, J. Reuter, 2014
- New Results for Position Estimation in Electro-Magnetic Actuators Using a Modified Discrete Time Class A/B Model Reference Approach, F. Straußberger, M. Schwab, T. Braun, J. Reuter, 2014
- Intermediate Linear Voltage Control for Motion State Detection in Solenoid Valves: a Lyapunov Approach, M. Schwab, T. Braun, F. Straußberger, J. Reuter, 2014
- State Estimation for Fast-Switching Solenoid Valves - A Nonlinear Sliding-Mode-Observer Approach, T. Braun, M. Schwab, F. Straußberger, J. Reuter, 2014
- A Distributed Parameter Approach for Dual Solenoid Valve Control With Experimental Validation, T. Braun, J. Reuter, 2013
- Flux Channel Models for Solenoid Valve Control, Felix Rey, J. Reuter, 2012
- A Model Reference Adaptive Approach for State Estimation in Electromagnetic Actuators, F. Prauße, J. Reuter, 2012
- Nonlinear Observer For A Dual Coil Solenoid Valve, M. Jäkle, J. Reuter, 2012
- Investigations on flux channel models for control of solenoid valve actuators, J. Reuter, F. Prauße, M. Jäkle, 2011
- Model-based control of solenoid actuators using flux channel reluctance models, J. Reuter, Felix Rey, F. Prauße, M. Jäkle, 2011
- Optimized Control Strategies for Fast Switching Solenoid Valves, J. Reuter, Märkl, Sebastian, M. Jäkle, 2010
- Aspects on Controlling Dual-Coil Solenoid digital Valves, J. Reuter, S. Märkl, 2009

Tristan
Braun
Raum
E
203
+49 7531 206 420
tbraun@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Florian
Straußberger
Raum
E
203
+49 7531 206-248
fstrauss@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung
Zurück zu Forschung