Team - Robotik
Die Arbeitsgruppe beschäftigt sich mit autonomen robotischen Systemen. Einer der Schwerpunkte ist dabei die Planung und Steuerung von Bewegungsabläufen mobiler Roboter und Cobots.
Ein weiteres Forschungsgebiet umfasst die Lokalisierung und Kartierung mittels mobiler Roboter, auch bekannt als Simultaneous Localization and Mapping (SLAM). Darüber hinaus beschäftigt sich die Arbeitsgruppe damit, wie sich Roboter in menschlichen Gesellschaften auf eine Weise bewegen können, dass sie soziale Normen, Konventionen und Erwartungen respektieren und einhalten (Socially Compliant Mobile Robot Navigation).
SODAH
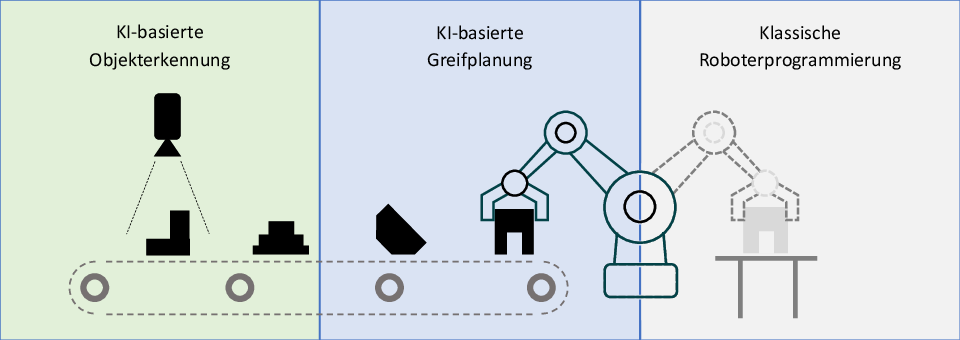
Das Ziel von SODAH ist die Entwicklung eines möglichst kostengünstigen und skalierbaren Handhabungssystems, bestehend aus einem 6-DOF-Roboter und einem Sensorsystem. SODAH erkennt zu greifende Objekte auf einem Förderband, um Greifmuster zu erlernen und auszuführen. Für die Steuerung des Roboters werden klassische Programmieransätze mit KI-Algorithmen kombiniert, um einen fließenden Übergang zu ermöglichen und das Vertrauen in die KI-basierte Steuerung zu stärken. mehr...
CaroBot
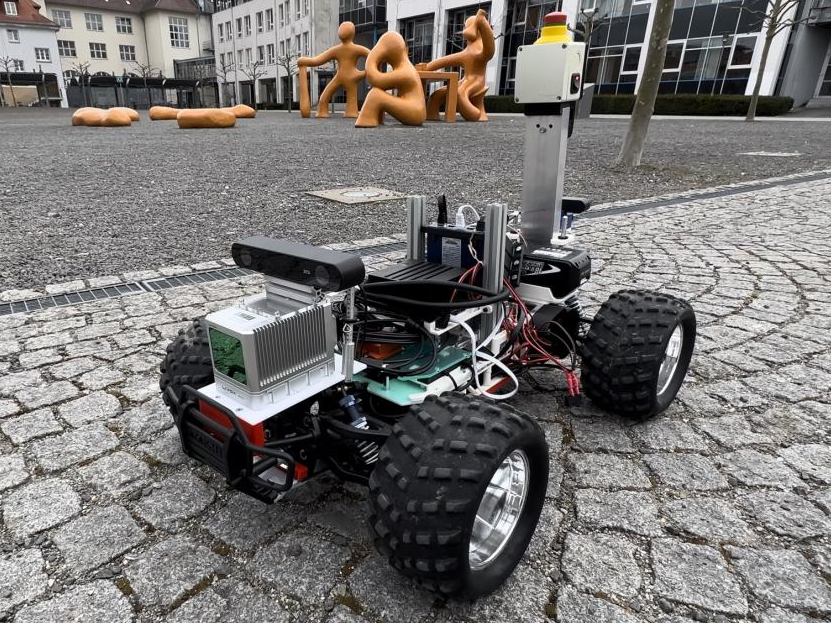
Der CaroBot ist ein autonomes Modellfahrzeug im Maßstab 1:6, das für den Offroad-Einsatz konzipiert wurde und sich daher nicht nur auf befestigten Wegen, sondern auch im offenen Gelände sicher bewegen kann.
Das Fahrzeug ist mit einem Livox 3D-Lidar Sensor mit einem horizontalen Sichtfeld von 120°, einer ZED2-Stereokamera zur Umgebungserfassung sowie einer XSens IMU, die hochfrequente Lage- und Beschleunigungsdaten liefert, ausgestattet.
Dieses multimodale Sensorsetup bildet die Grundlage für eine robuste Umfelderfassung und Zustandsbestimmung.
mehr...
Eurobot
EUROBOT ist ein internationaler Robotikwettbewerb, an dem studentische Teams aus der ganzen Welt teilnehmen. Jedes Jahr gibt es ein neues Thema mit spezifischen Aufgaben, die die Roboter in 100-sekündigen Spielrunden autonom lösen müssen. Die Teams entwickeln ihre Roboter vollständig selbst - vom Design über die Konstruktion bis hin zur Programmierung. Auf einem 2×3 Meter großen Spielfeld treten die Roboter gegeneinander an und das Team, dessen Roboter die gestellten Aufgaben am besten löst, gewinnt. EUROBOT fördert nicht nur technisches Know-how, sondern auch Teamarbeit, Innovationsgeist und interdisziplinäres Problemlösen.
mehr...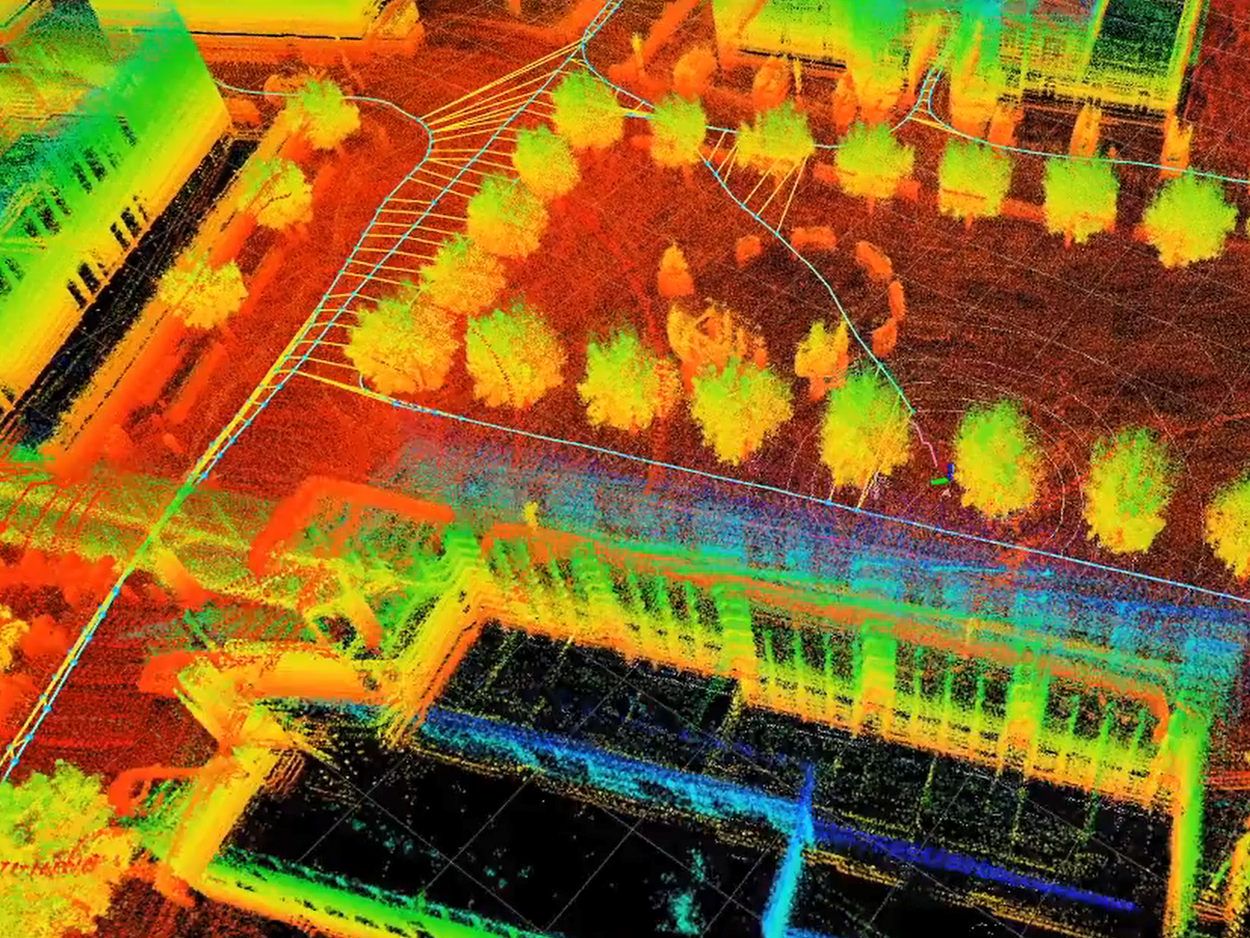
LiDAR SLAM
In studentischen Projekten werden aktuelle Algorithmen zur Lösung des Simultaneous Localization and Mapping (SLAM) Problems analysiert und deren Leistungsfähigkeit bewertet. Dabei werden sowohl die Genauigkeit als auch der Rechenaufwand, der Speicherbedarf und die Anwendungskomplexität betrachtet.
mehr...