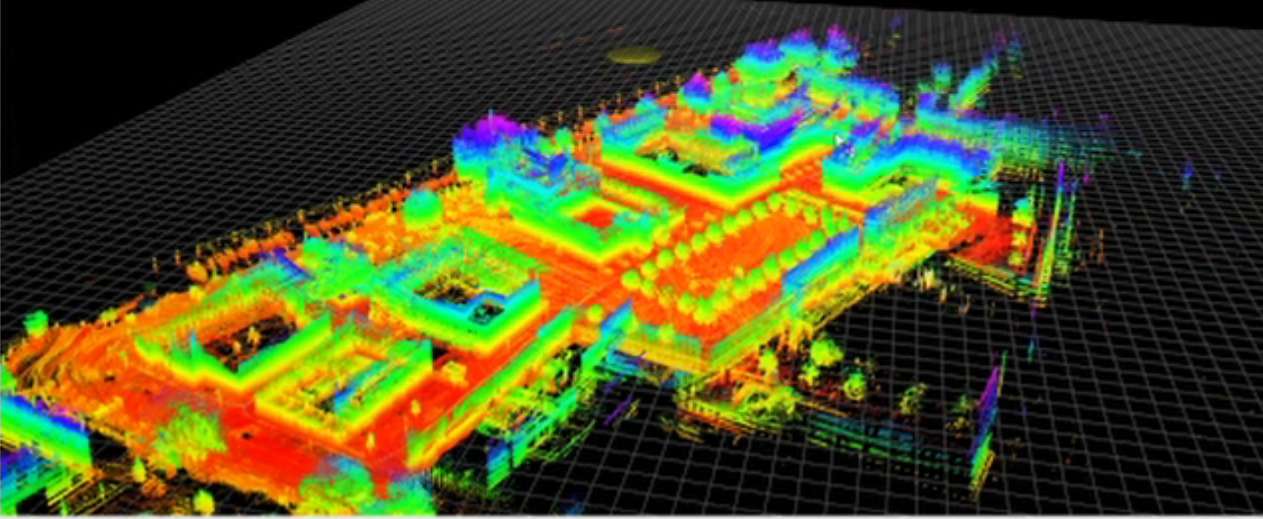
LiDAR SLAM
In studentischen Projekten werden aktuelle Algorithmen zur Lösung des Simultaneous Localization and Mapping (SLAM) Problems analysiert und deren Leistungsfähigkeit bewertet. Dabei werden sowohl die Genauigkeit als auch der Rechenaufwand, der Speicherbedarf und die Anwendungskomplexität betrachtet.
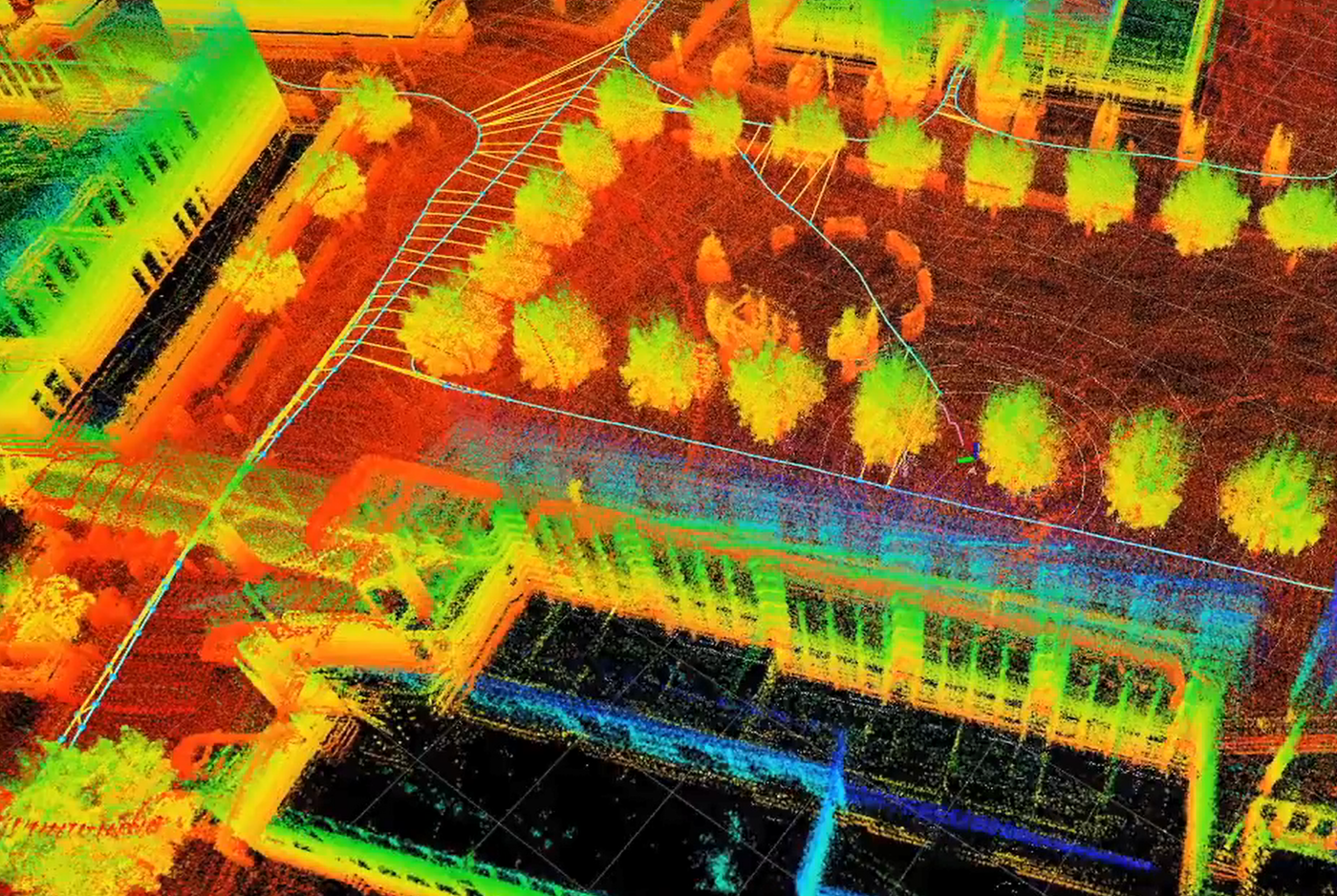
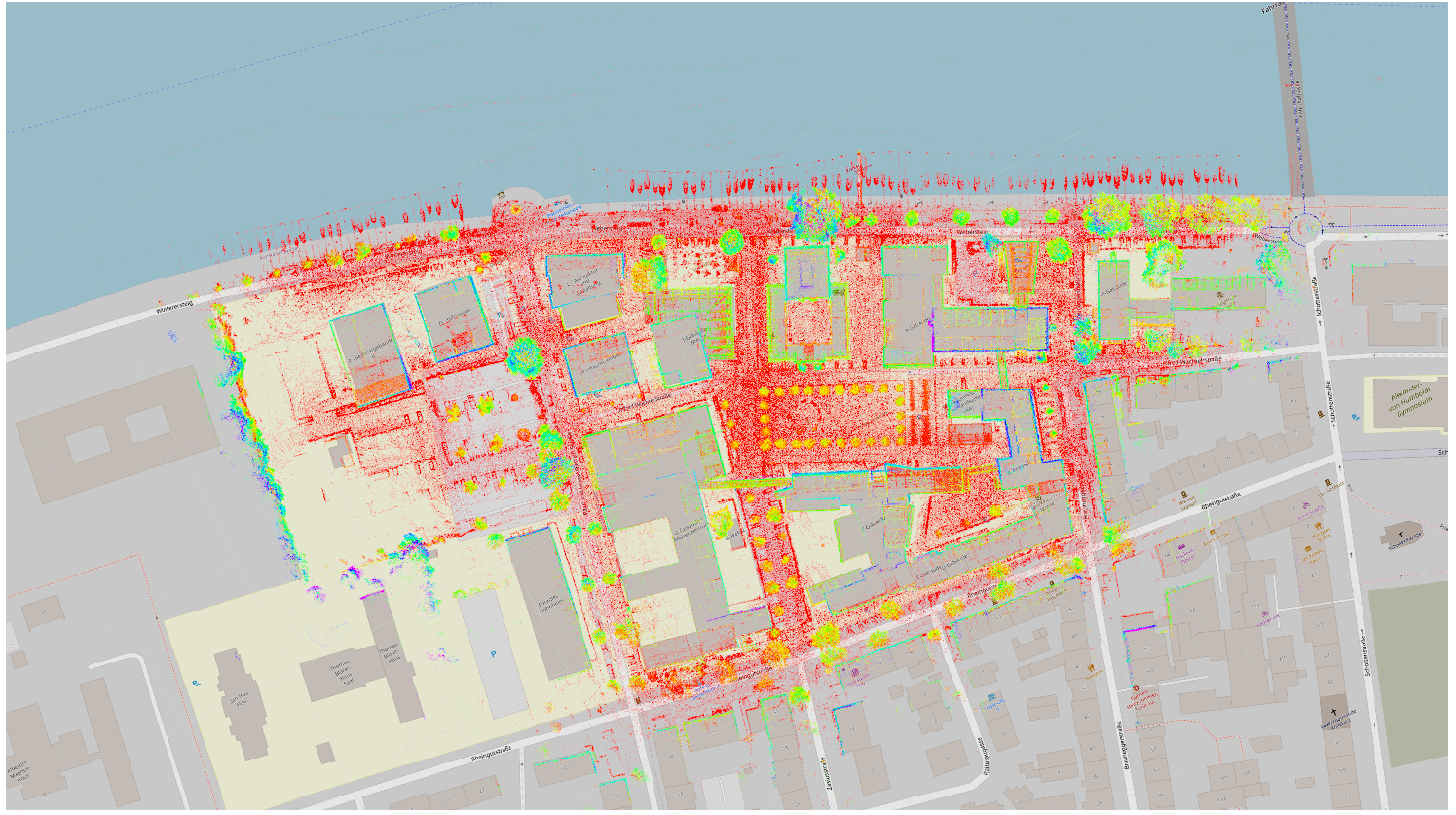
Neben öffentlich verfügbaren Datensätzen werden auch Datensätze verwendet, die auf dem Campus der HTWG aufgenommen wurden.
Eigene CI/CD-Pipelines ermöglichen die automatisierte Evaluierung unterschiedlichster Datensätze mit variierenden Sensorkonfigurationen und Anwendungsszenarien sowie den systematischen Vergleich verschiedener SLAM-Algorithmen.