Smart Object Detection and Handling (SODAH)
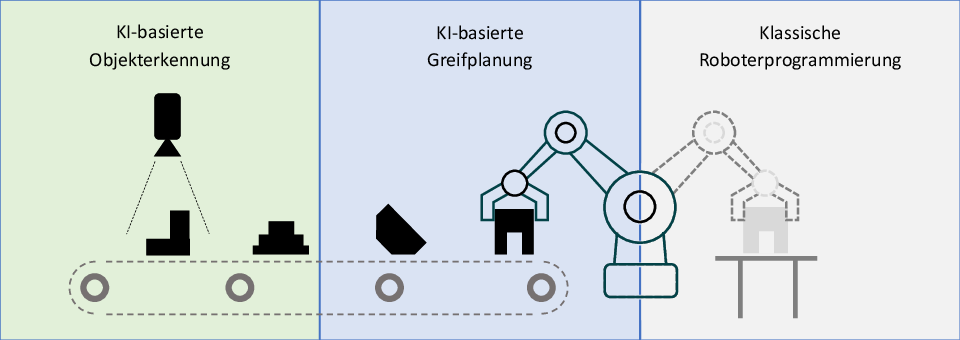
Das Ziel von SODAH ist die Entwicklung eines möglichst kostengünstigen und skalierbaren Handhabungssystems, bestehend aus einem 6-DOF-Roboter und einem Sensorsystem. SODAH erkennt zu greifende Objekte auf einem Förderband, um Greifmuster zu erlernen und auszuführen. Für die Steuerung des Roboters werden klassische Programmieransätze mit KI-Algorithmen kombiniert, um einen fließenden Übergang zu ermöglichen und das Vertrauen in die KI-basierte Steuerung zu stärken. mehr...