Smart Object Detection and Handling (SODAH)
Hintergrund und Problemstellung
Die Automatisierung von Fertigungsprozessen ist für den Industriestandort Deutschland von entscheidender Bedeutung, da sie die Produktivität und Wettbewerbsfähigkeit steigert und die Herstellung qualitativ hochwertiger Produkte ermöglicht. Ein typischer Arbeitsschritt in einem automatisierten Fertigungsprozess ist das Greifen von Objekten durch Roboter von einem Förderband und das Ablegen an einem vordefinierten Übergabepunkt. Bestehende Systeme haben jedoch häufig Probleme mit der Umgebungserfassung, z.B. bei spiegelnden oder dunklen Objekten oder wenn sich viele kleine Objekte auf dem Band befinden, die sich überlappen. Darüber hinaus sind bestehende Ansätze nicht für die Aufnahme von bewegten Objekten in Echtzeit geeignet.

Zielstellung und Lösungsansatz
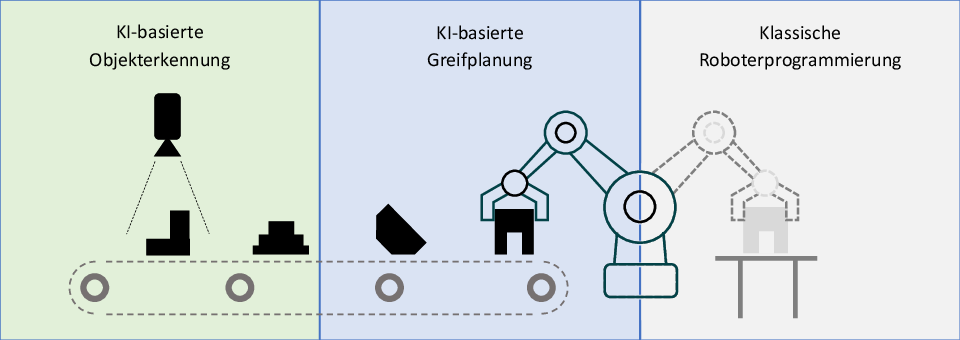
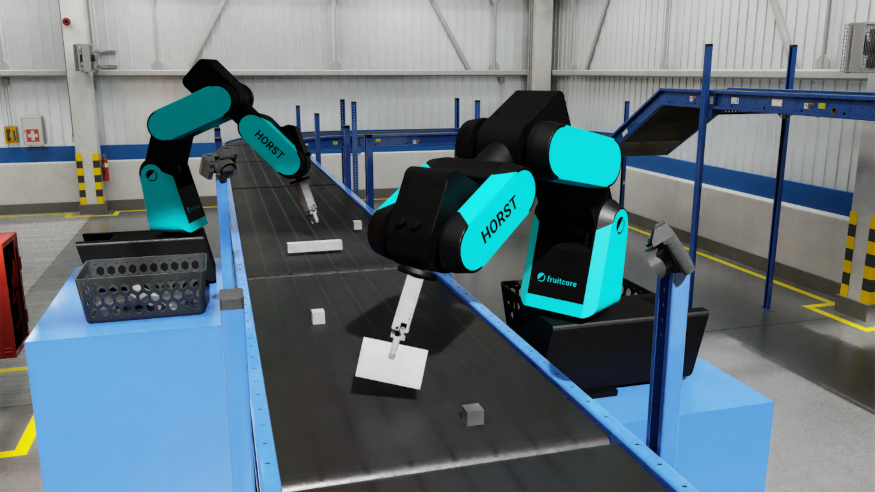
Ziel des Projekts SODAH ist daher die Entwicklung eines möglichst kostengünstigen, aber skalierbaren autonomen Handhabungssystems, bestehend aus einem 6-DOF-Roboter und einem Sensorsystem zur Erkennung von Objekten auf einem Förderband. Das angestrebte System soll in der Lage sein, den Prozess über die Sensoren zu beobachten, die zu greifenden Objekte zu erkennen, um entsprechende Greifpläne zu erlernen und auszuführen. Für die Steuerung des Roboters sollen klassische Programmieransätze mit KI-basierten Algorithmen kombiniert werden, um einen fließenden Übergang zu ermöglichen und das Vertrauen potenzieller Kunden in die KI-basierte Steuerung zu stärken.
Kernarbeiten des Projektes
Um dieses Ziel zu erreichen, werden Sensoren wie LiDAR, Monokamera, Stereokamera und RGB-D-Kamera sowie verschiedene Kombinationen davon evaluiert. Dies soll eine möglichst robuste, genaue und universell einsetzbare Objekterkennung und 3D-Rekonstruktion ermöglichen. Anschließend werden echtzeitfähige KI-basierte 3D-Rekonstruktionsverfahren entwickelt, mit deren Hilfe Greifpunkte oder Flächen bestimmt werden, an denen der Roboter das Objekt greifen kann. Damit der Roboter die erkannten Objekte auf dem laufenden Förderband sicher greifen kann, muss die Bewegung des Roboters in Echtzeit geplant und ausgeführt werden. Hierzu werden Bewegungs- und Greifplanungsalgorithmen auf Basis bestehender KI-basierter Ansätze entwickelt und evaluiert. Schließlich soll das System durch die Entwicklung einer kontinuierlichen Online-Kalibrierung robust gegenüber äußeren Einflüssen im Betrieb, wie z. B. Vibrationen, gemacht werden.
Verwertungspotenzial
Die in SODAH entwickelten Algorithmen sind so konzipiert, dass sie mit geringem Aufwand auf neue Objekte mit beliebigen geometrischen Formen angewendet werden können. Insbesondere soll die Objekterkennung auch auf metallischen und spiegelnden Oberflächen anwendbar sein, was mit heutigen Systemen nicht möglich ist. Der modulare Aufbau des Systems ermöglicht den Einsatz alternativer Sensoren und Roboter, wodurch insbesondere KMUs wirtschaftlich sinnvolle Automatisierungsoptionen erhalten. Durch diese Flexibilität des Systems ist ein Einsatz in den unterschiedlichsten Bereichen der Industrie denkbar.
Projektförderung
Das Projekt SODAH wird durch das BMFTR mit der Förderlinie KI4KMU gefördert.
Förderkennzeichen: 16|S24041
Konsortium
S&K Anlagentechnik GmbH
Hochschule für Technik, Wirtschaft und Gestaltung Konstanz
fruitcore robotics GmbH
 |  |  |  |
Mitarbeiter

Florian
Drescher
Raum
E
203
fdresche@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Christopher
Gogl
Raum
E
203
cgogl@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Daniel
Kuhn
Raum
E
203
dkuhn@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Jan
Schmidt
Raum
E
203
jschmidt@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Prof. Dr.
Michael
Blaich
Raum
F
123
+49 7531 206-514
mblaich@htwg-konstanz.de
Sprechzeiten
nach Vereinbarung