CaroBot
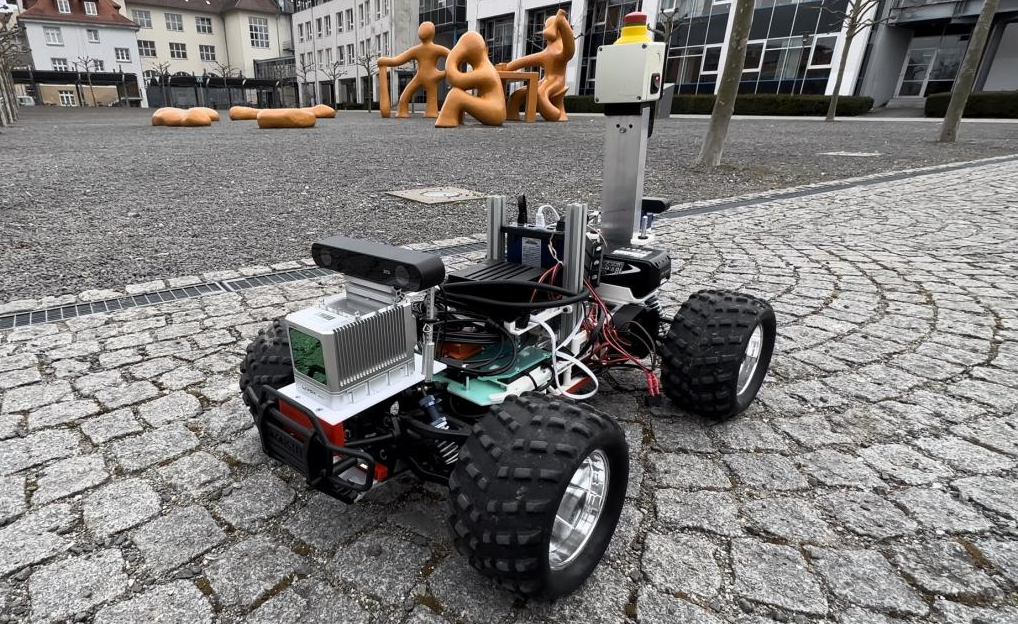
Der CaroBot ist ein autonomes Modellfahrzeug im Maßstab 1:6, das für den Offroad-Einsatz konzipiert wurde und sich daher nicht nur auf befestigten Wegen, sondern auch im offenen Gelände sicher bewegen kann.
Das Fahrzeug ist mit einem Livox 3D-Lidar Sensor mit einem horizontalen Sichtfeld von 120°, einer ZED2-Stereokamera zur Umgebungserfassung sowie einer XSens IMU, die hochfrequente Lage- und Beschleunigungsdaten liefert, ausgestattet.
Dieses multimodale Sensorsetup bildet die Grundlage für eine robuste Umfelderfassung und Zustandsbestimmung.
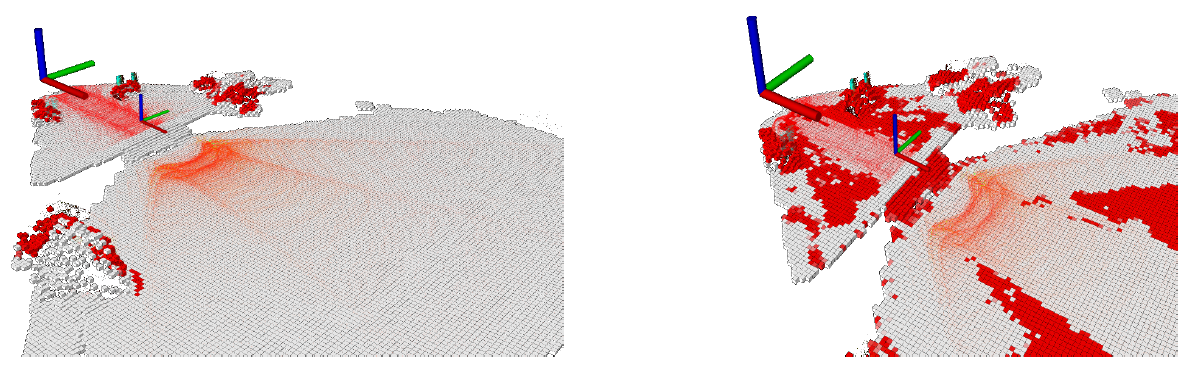
Das Fahrzeug dient als Plattform für die Entwicklung verschiedener Algorithmen zur, Segmentierung befahrbarer Flächen (Traversable Ground Segmentation) auf Basis von LiDAR- und Kameradaten, zur Lokalisierung in vorab erfassten 3D-Punktwolken mittels Feature-Matching oder Dichtevergleichen, zur Generierung von Belegtheitsgittern (Occupancy Grids) aus unstrukturierten Punktwolkendaten sowie zur Trajektorienplanung und -regelung unter Berücksichtigung der kinematischen Beschränkungen eines Ackermann-Fahrzeugs.
Darüber hinaus dient der CaroBot als Testplattform für die Entwicklung und Validierung von Algorithmen für das autonome Fahren im Rahmen der Formula Student Driverless. Ziel ist es, das Bodensee Racing Team bei der Integration, Evaluierung und Optimierung entsprechender Ansätze und Algorithmen zu unterstützen.