Neue Verfahren zur Vermeidung von Schiffskollisionen auf Binnenseen
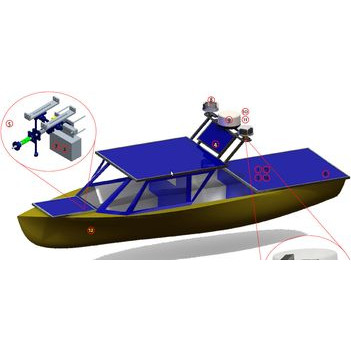
Im Projekt "Collosion Avoidance" der Hochschule Konstanz sollen Kollisionsvermeidungsstrategien für Sportboote auf Binnengewässern untersucht und entwickelt werden. Hierfür muss mit Hilfe entsprechend kostengünstiger und energieeffizienter Sensorik die lokale Verkehrssituation erfasst und durch entsprechende Algorithmen aufbereitet werden. Auf Basis dieser Daten sollen dem Schiffsführer Warnungen über eine Schiffkollision gegeben werden und ein Ausweichmanöver vorgeschlagen werden. Im finalen Schritt soll das Boot in die Lage versetzt werden, sich selbstständig an einen benutzerdefinierten Ort zu bewegen.
Kollisionen machen im Bereich der Schifffahrt den Großteil aller Unfälle aus. Statistiken belegen menschliches Versagen als eine Hauptunfallursache. Um eine Minderung des Kollisionsrisikos zu erreichen, sind in der kommerziellen Schifffahrt Systeme im Einsatz, die basierend auf GPS, Radar, Automatic Identification System (AIS) sowie digitalen Karten (ECDIS), den Schiffsführer bei der Navigation unterstützen.
Für den nicht-kommerziellen Verkehr und kleinere Sportboote sind entsprechende Systeme nicht verbreitet. Diese Boote sorgen jedoch für den deutlich größten Teil des Verkehrsaufkommens auf Binnenseen. Die Übertragbarkeit vorhandener Systeme ist aus einer Vielzahl von Gründen nicht gegeben.
Das Projekt ist an der Fakultät Elektrotechnik im Fachgebiet Regelungstechnik, unter der Leitung von Prof. Dr. Johannes Reuter, angesiedelt. Gefördert wird das gesamte Forschungsprojekt vom Bundesministerium für Bildung und Forschung (BMBF) und der Arbeitsgemeinschaft industrieller Forschungsvereinigungen "Otto von Guericke" e.V. (AiF). An diesem Projekt sind zusätzlich zur HTWG Konstanz noch das Institut für Systemdynamik (isys) der Universität Stuttgart, die Max-Planck-Gesellschaft für Dynamik komplexer technischer Systeme und die Hochschule Ulm, sowie die Unternehmen Innovative Navigation GmbH und NAVICO beteiligt.
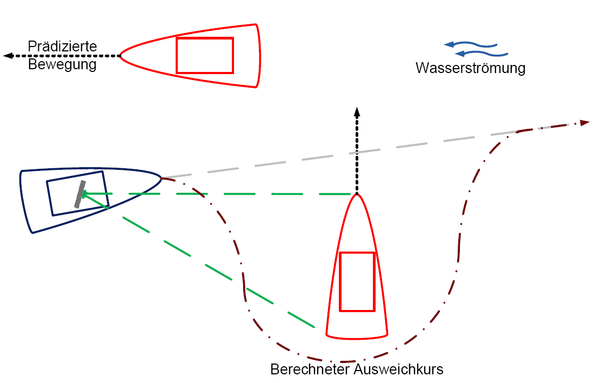
Typisches Szenario
Für jedes in Sensorreichweite befindliche Objekt (rot) ermittelt das autonome Boot (blau) die aktuelle Position und die vermutete Bewegungsrichtung sowie Daten über Umwelteinflüsse (Wind, Strömung usw...). In der folgenden Abbildung erkennt das autonome Boot einen vorfahrtsberechtigten Verkehrsteilnehmer, welcher seinen Kurs kreuzt. Daraufhin wird eine Ausweichroute berechnet und diese ggf. automatisch ausgeführt. Nach Abschluss des Manövers kehrt das Boot auf den ursprünglichen Steuerkurs zurück.

Stefan
Wirtensohn
Raum
E
207
+49 7531 206-549
stwirten@htwg-konstanz.de
Sprechzeiten
Nach Vereinbarung

Michael
Blaich
mblaich@htwg-konstanz.de

Michael
Schuster
Raum
E
207
+49 7531 206-576
michael.schuster@htwg-konstanz.de
Forschungsschwerpunkte
Das Projekt unterteilt sich in zwei Themenbereiche:
- Beim ersten Themenbereich handelt es sich um Datenfusion und Objektverfolgung. Die Sensordaten müssen unter Berücksichtigung der Schiffseigenbewegung verarbeitet und fusioniert werden. Aus diesen Daten wird eine Karte mit allen bewegten und statischen Objekten der Umgebung erstellt.
- Der zweiten Themenbereich beschäftigt sich mit der Wegplanung und dem automatisierten Durchführen von Manövern. Aus der dynamischen Karte muss ein kollisionsfreier Weg zum Ziel berechnet werden. Aus dem ermittelten Weg werden über adaptive Kursregler die Stellgrößen für Ruder und Antrieb abgeleitet.
Anwendungsmöglichkeiten
- Unterstützung des Schiffsführers zur Reduzierung von Schiffskollisionen
- Optimierung des Treibstoffverbrauchs
- Durchführung von Routinetätigkeit (z.B. Probenentnahme)
- Patrouillenfahrten
- selbstpositionierende Boje
- automatisiertes Anlegen
Publikationen
- Mission Integrated Collision Avoidance for USVs using Laser Ranger, M. Blaich, S. Köhler, M. Schuster, J. Reuter, Thomas Tietz, 2015
- Trajectory Generation for Vessels using a Reachability Graph, M. Blaich, S. Wirtensohn, J. Reuter, Axel Hahn, 2015
- Probabilistic Data Association for Tracking Extended Targets Under Clutter Using Random Matrices, M. Schuster, J. Reuter, Gerd Wanielik, 2015
- Collision Avoidance for Vessels using a Low-Cost Radar Sensor, M. Schuster, M. Blaich, J. Reuter, 2014
- Objektverfolgung bei einer vollständigen Fahrzeugumfeldüberwachung mittels Radar , M. Schuster, Pech, Thomas, J. Reuter, Wanielik, Gerd, 2014
- Optimal Control Allocation for an ASC with two Azimuth-like Thrusters with limited Panning Range, M. Oswald, M. Blaich, S. Wirtensohn, J. Reuter, 2014
- Motion Estimation of an Autonomous Surface Craft using an Unscented Kalman Filter, S. Wirtensohn, M. Schuster, M. Oswald, J. Reuter, 2014
- Neue Verfahren zur Kollisionsvermeidung auf Wasserstraßen durch Optimierung der Schiffsrouten, M. Blaich, M. Schuster, J. Reuter, 2014
- Positionsbestimmung und Bewegungsschätzung für Wasserfahrzeuge mittels Unscented Kalman Filter, S. Wirtensohn, M. Schuster, J. Reuter, 2014
- Tracking of Vehicles on Near Side Lanes using multiple Radar Sensors, M. Schuster, J. Reuter, G. Wanielik, 2014
- Modelling and Identification of a Twin Hull Based Autonomous Surface Craft, S. Wirtensohn, J. Reuter, M. Blaich, M. Schuster, O. Hamburger, 2013
- Design of a Twin Hull Based USV with Enhanced Maneuverability, M. Blaich, S. Wirtensohn, M. Oswald, O. Hamburger, J. Reuter, 2013
- Mapping Of Inland Waters Using Radar, Matthias Greuter, M. Blaich, M. Schuster, Matthias Franz, J. Reuter, 2012
- Fast Grid Based Collision Avoidance for Vessels using A* Search Algorithm, M. Blaich, Michael Rosenfelder, M. Schuster, Oliver Bittel, J. Reuter, 2012
- Extended Grid Based Collision Avoidance Considering COLREGs for Vessels, M. Blaich, Michael Rosenfelder, M. Schuster, Oliver Bittel, J. Reuter, 2012
- Integration von Navigationsalgorithmen in Regelkreise am Beispiel autonomer Systeme auf dem Wasser, J. Reuter, M. Blaich, M. Schuster, 2012
Zurück zu Forschung