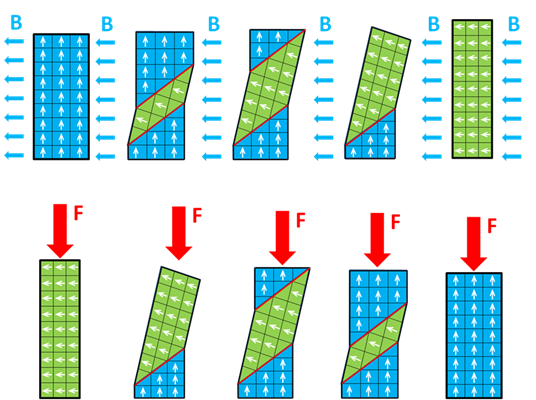
Magnet Aktuatoren
Durch den laufenden Fortschritt in der Mikroelektronik werden die Komponenten immer kleiner und oftmals empfindlicher. Es ergeben sich damit für die Bestückung dieser Komponenten Anforderungen an den Greifer. In Zusammenarbeit mit der ETO-Gruppe sollen Greifer Prototypen untersucht werden, welche durch die Verwendung von magnetischen Formgedächtnislegierung die benötigte linear Bewegung erzeugen. Dabei sollen Themen wie Lageregelung, Kraftregelung, Selfsensing und Modellbildung untersucht werden. mehr...

Modellprädiktive Temperaturregelung
In der modernen, industriellen Möbelfertigung kommen sehr häufig Holzplatten aus Pressspan zum Einsatz. Die Schmalflächenversiegelung der Platten ist hierbei ein elementarer Bestandteil und stellt hohe Ansprüche an die Verfahrenstechnik. Zusammen mit der HOMAG GmbH arbeitet das ISD an modernen, modellprädiktiven Regelungsalgorithmen für dieses Verfahren. mehr...

Intelligente Fahrerassistenz
Selbstbalancierende Personentransporter erschließen Menschen mit einer Gehbehinderung und all jenen, die sich eine hohe Mobilität bei höchstem Komfort wünschen, völlig neue Möglichkeiten und Horizonte. Im Projekt Fahrerassistenzsysteme entwickelt eine Forschungsgruppe des ISDs mit der JOYY Mobility GmbH intelligente Algorithmen, die durch eine permanente Erfassung des Umfeldes und modellprädiktiver Regelung in der Lage sind, potenziell gefährliche Situationen bereits im Vorfeld zu erkennen und geeignete Maßnahmen zur Unfallvermeidung einzuleiten. mehr...

Entwicklung eines Sensoraufbaus zur Realisierung autonomer Anwendungen auf Binnengewässern
Mit Hilfe eines optischen Sensoraufbaus bestehend aus Lasersensor, Kameras, GPS und Inertialsensorik soll die Umgebung des Bootes und dessen Eigenbewegung aufgezeichnet werden. Aus diesen Daten soll die Umgebung möglichst präzise beschrieben werden, um Anwendungen wie autonomes Docking oder Kollisionsvermeidung zu realisieren. mehr...

Entwicklung und Erprobung eines integrierten autonomen Messsystems für maritime Vermessungsaufgaben
Das Ziel des Projektes ist die Integration einer Kollisionsvermeidung um die Autonomie und die Handhabung des Sonobots zu verbessern. Zusätzlich wird ein mathematisches Modell der dynamischen Eigenschaften des Sonobots erstellt und dessen Parameter identifiziert. mehr...

Neue Verfahren zur Vermeidung von Schiffskollisionen auf Binnenseen
Im Projekt "Collosion Avoidance" der Hochschule Konstanz sollen Kollisionsvermeidungsstrategien für Sportboote auf Binnengewässern untersucht und entwickelt werden. Hierfür muss mit Hilfe entsprechend kostengünstiger und energieeffizienter Sensorik die lokale Verkehrssituation erfasst und durch entsprechende Algorithmen aufbereitet werden. Auf Basis dieser Daten sollen dem Schiffsführer Warnungen über eine Schiffkollision gegeben werden und ein Ausweichmanöver vorgeschlagen werden. Im finalen Schritt soll das Boot in die Lage versetzt werden, sich selbstständig an einen benutzerdefinierten Ort zu bewegen. mehr ...
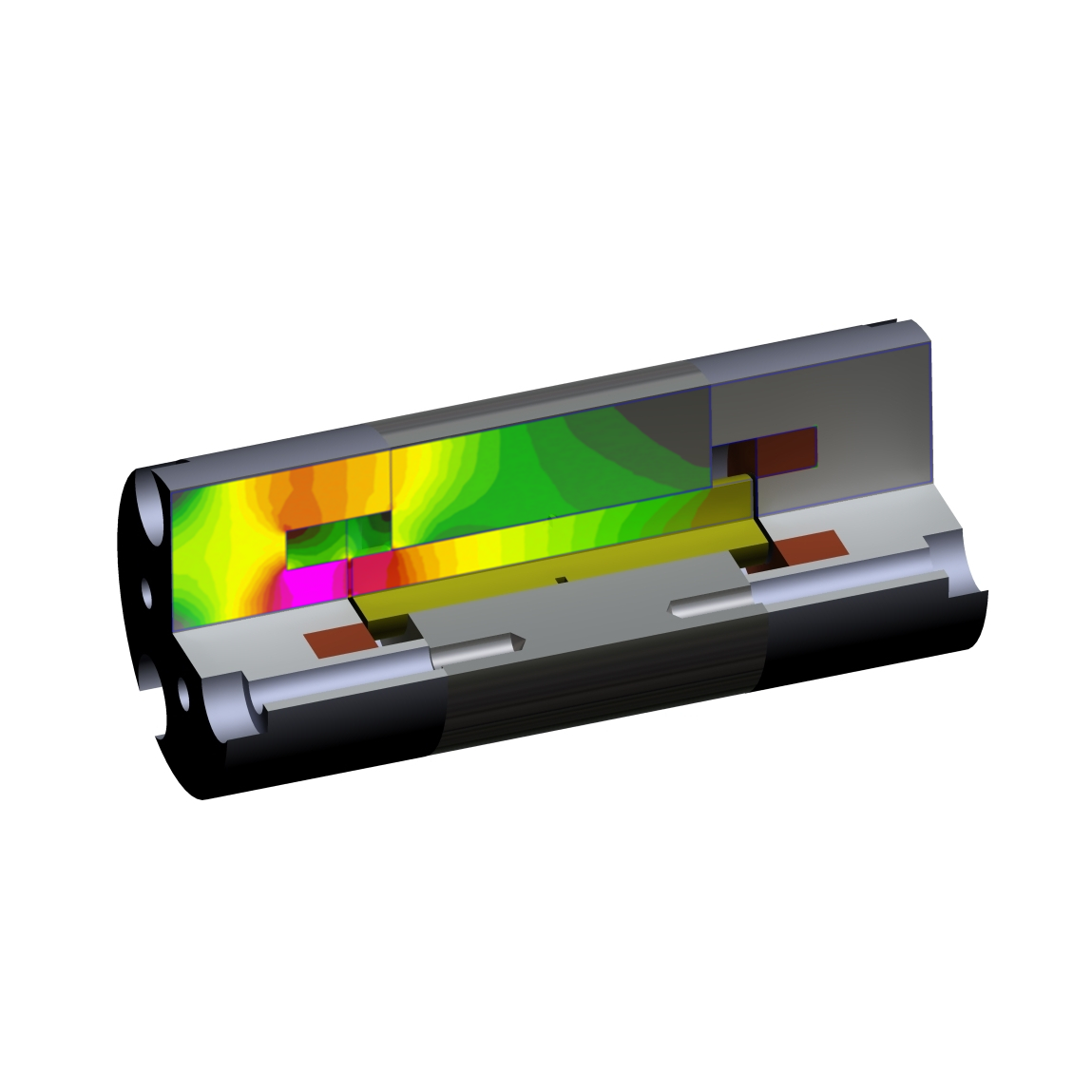
Softlanding for Fast-Switching Electromagnetic Actuators
Fast-switching electromagnetic actuators are applied in many technical systems. For instance, they are used in antilock braking systems (ABS), camless engines, or in digital hydraulics. The predominant control strategy of these actuators is the so-called Boost-and-Hold method. However, this method comes along with high dissipation of energy, and as a result it is normally not energy-optimal. In the "Softlanding" project of the Constance University of Applied Sciences, procedures to the control, observation, and diagnostics for fast-switching electromagnetic actuators shall be developed. This includes strategies, that are energy-optimal on the one hand, and enable softlanding on the other hand. mehr ...

Catamaran Robot: Locomotion In Maritime Environments
Das Ziel des CaroLIME Projektes ist es einen Wasserroboter zu entwickeln der in einer für ihn unbekannten Umgebung selbständig navigieren und arbeiten kann. Um dies zu erreichen wird ein Versuchsträger entwickelt, auf dem der Einsatz verschiedenster Sensoren, Antriebs- und Regelungskonzepte untersucht werden kann. mehr ...
Diagnostics and Prognostics for Linear Electromagnetic Actuators
With increasing machine and component complexity, advanced maintenance strategies become more desirable and necessary. Besides the widely used break-down maintenance (fix it when it breaks) two approaches exist, that try to plan and schedule maintenance. One is preventive maintenance, where components are replaced or maintained based e.g. on a constant time interval, the other one is predictive maintenance. Here the aim is to estimate the current state of health of a component and to predict its remaining useful life based on diagnostic and prognostic methods. mehr...
State Estimation for Electromagnetic Actuators
In order to realize advanced control or enable enhanced diagnostic opportunities, knowledge of the system state is a key requirement. The use of additional sensors is, in general, prohibited due to cost or space restrictions, or at least undesired due to reliability reasons. mehr ...